













“盲目的”猎豹3机器人可以爬上满是障碍物的楼梯
柯立芝
www.diecastingpartsupplier.com
2018-07-06 17:11:57

接触检测算法帮助机器人确定在摆动和步进之间转换腿的最佳时间,通过不断计算每个腿的三个概率:腿与地面接触的概率,一旦腿撞击就产生力的概率地面,以及腿在中间的可能性。该算法基于来自陀螺仪,加速度计和腿的关节位置的数据计算这些概率,其记录腿相对于地面的角度和高度。
虽然这项技术改变了世界和我们的想法,但我们公司XY-GlOBAL(www.diecastingpartsupplier.com)认为,只有发展我们的技能和技术才能使公司更长久地生存,以满足客户的需求,更专业,更有创意,更富有成效。
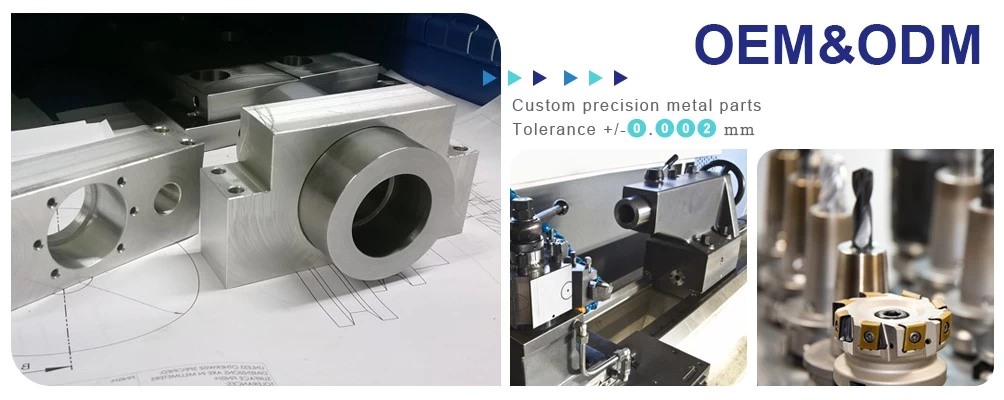
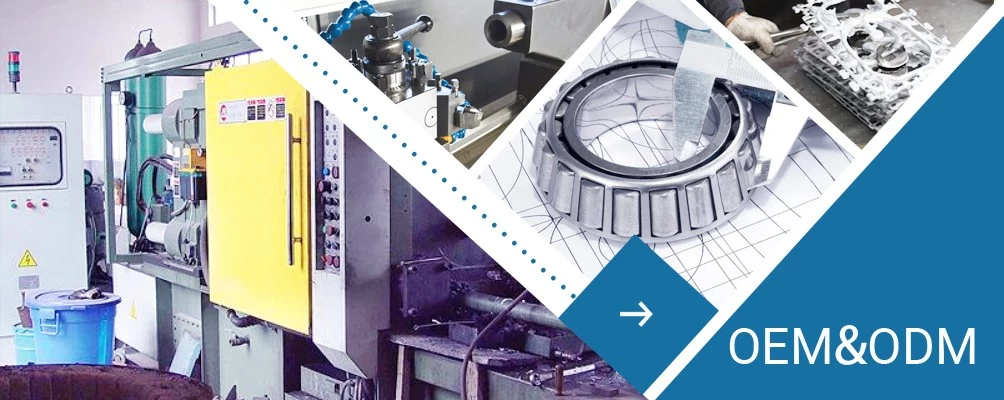
XY-GLOBAL致力于以极具竞争力的价格和短交货期制造和供应高质量的产品。随着公司和市场的发展,我们建立了非常统一和高效的10年生产工程团队,设计和工作经验。开发团队和销售团队,同时我们增加机器人研究,开发和销售配件和工业控制方案。