


























試行錯誤のロボットを介して新しいスキルを学ぶことができます
naky
www.diecastingpartsupplier.com
2015-05-26 18:27:23
カリフォルニア大学バークレー校の研究者は、主要なマーキング、より密接に人間が学ぶように近似するプロセスを使用して試行錯誤を介してモータのタスクを学習するロボットを可能にするアルゴリズムを開発しました マイルストーン 人工知能の分野では。服を入れて - 彼らは、ロボットがさまざまなタスクを完了したことにより、それらの技術では、強化学習のタイプを、実証しました ハンガー その周囲約せずに、事前にプログラムの詳細 - ラック、水ボトルのキャップをねじ込み、おもちゃの飛行機を組み立て、さらに上。
「私たちはここで報告していることを学習するロボットに力を与えるための新しいアプローチで、「教授ピーター·Abbeelは電気工学とコンピュータサイエンスのUCバークレー校の教室の中で述べています。 "キーは、ロボットが何か新しいことに直面したとき、我々はそれを再プログラムする必要がないということである。ロボットが学ぶことができますどのようにエンコードし、まったく同じソフトウェアは、ロボットは我々が与えたすべての異なるタスクを学習できるようにするために使用されましたそれ。 "
最新の開発は、ロボット工学に関する国際会議で、シアトルとオートメーション(ICRA)で、5月28日(木曜日)に発表される予定。 Abbeelは仲間カリフォルニア大学バークレー校でプロジェクトをリードしています 学部 メンバートレバーダレル、バークレービジョンと学習センターのディレクター。チームの他のメンバーは、ポスドク研究員セルゲイ·レヴァインと博士号を取得しています学生チェルシーフィン。
仕事は社会の利益のために情報技術研究のためUCのセンター(CITRIS)で新しい人とロボットイニシアチブの一部です。新しいマルチキャンパスは、学際的な研究イニシアティブは、人工知能、ロボット工学と自動化で目まぐるしい進歩を維持しようとします整列しました 人間のニーズに。
「ほとんどのロボットのアプリケーションは、オブジェクトが予測位置にある制御された環境にあり、「ダレルは言いました。 「家庭やオフィスのような、実際の設定にロボットを置くの課題は、これらの環境は常に変化していることである。ロボットが感知し、その周囲に適応することができなければなりません。」
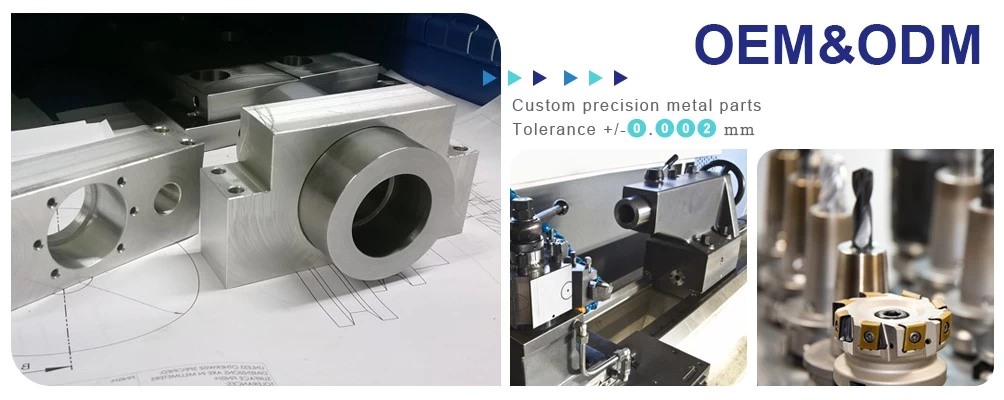
以下は、私たちの会社の詳細です:当社の工場はではずれました ダイは買いダイキャストモデルを意味キャストされ、キャスト軍ダイ、
キャストプロモーションダイ、キャストメタルダイ 2002年、当社製品以来、多くの年のために常に十分に受信され、アジア、ヨーロッパ、北アメリカとオーストラリアなどから、お客様により承認
キャストプロモーションダイ、キャストメタルダイ 2002年、当社製品以来、多くの年のために常に十分に受信され、アジア、ヨーロッパ、北アメリカとオーストラリアなどから、お客様により承認